gazebo skid steer plugin gazebo_ros_skid_steer_drive uses Gazebo Joint Motors to rotate each wheel joint at the . The excavator filter from Fonho is durable enough to perform any form of operation. It qualifies to all product standard certifications that make it more trusted to use. Using Fonho’s excavator filter improves the performance of your vehicles and makes them possible to run conditionally.
0 · urdf gazebo plugin
1 · skid steer drive plugin
2 · gazebo wheel joint drive plugin
3 · gazebo wheel drive plug in
4 · gazebo skid steer drive
5 · gazebo ros examples
6 · gazebo plugins for ros
7 · gazebo camera view
excavator bucket shaft manufacturers/supplier, China excavator .
gazebo_ros_skid_steer_drive uses Gazebo Joint Motors to rotate each wheel joint at the .
Skid Steer Drive Plugin. It allows us to manage a skid steer drive robot and obtain its information. The Skid Steer Drive plugin publishes and subscribes to the following Topics: Publications. odom [nav_msgs::msg::Odometry] -- Publishes information provided by the odometry sensor.gazebo_ros_skid_steer_drive uses Gazebo Joint Motors to rotate each wheel joint at the desired velocity. From the Setting Velocity on Links and Joints Tutorial: Configuring a joint motor is done using Joint::SetParam().Learn how to use Gazebo plugins with ROS to enhance your URDF models with sensors, actuators and visuals. See examples of camera, laser and block plugins for Gazebo-classic.A gazebo model plugin that controls a four wheel skid-steer robot via a gazebo topic. See the Pioneer3AT model in the OSRF model database for an example use case.
gazebo_ros_skid_steer_drive.h; gazebo_ros_skid_steer_drive.cpp; gazebo_plugins Author(s): John Hsu autogenerated on Tue Apr 6 2021 02:19:40 .
urdf gazebo plugin
skid steer drive plugin
32 * \brief A skid steering drive plugin. Inspired by gazebo_ros_diff_drive and SkidSteerDrivePluginI'm trying to work with new skid steering drive plugin and URDF model of Pioneer 3AT. I included plugin to my URDF file, but still getting:I'm fairly new to gazebo, robot modelling and plugins, and I'm now trying to make a small 4wd rover, but I have some problems with the plugins. I'm not able to make the libgazebo_ros_skid_steer_drive plugin work in my urdf file in ROS2, and I .Skid Steer plugin for a 4 wheel skid steer drive robot. #This plugin has been modified from the Diff-drive-plugin. #make sure to edit and add this in the bashscript for ease
I'm fairly new to gazebo, robot modelling and plugins, and I'm now trying to make a small 4wd rover, but I have some problems with the plugins. I'm not able to make the libgazebo_ros_skid_steer_drive plugin work in my urdf file in ROS2, and I .Skid Steer Drive Plugin. It allows us to manage a skid steer drive robot and obtain its information. The Skid Steer Drive plugin publishes and subscribes to the following Topics: Publications. odom [nav_msgs::msg::Odometry] -- Publishes information provided by the odometry sensor.gazebo_ros_skid_steer_drive uses Gazebo Joint Motors to rotate each wheel joint at the desired velocity. From the Setting Velocity on Links and Joints Tutorial: Configuring a joint motor is done using Joint::SetParam().
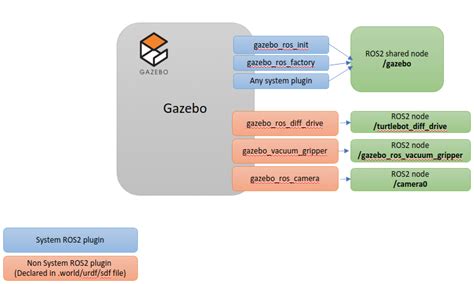
Learn how to use Gazebo plugins with ROS to enhance your URDF models with sensors, actuators and visuals. See examples of camera, laser and block plugins for Gazebo-classic.A gazebo model plugin that controls a four wheel skid-steer robot via a gazebo topic. See the Pioneer3AT model in the OSRF model database for an example use case.
gazebo wheel joint drive plugin
gazebo_ros_skid_steer_drive.h; gazebo_ros_skid_steer_drive.cpp; gazebo_plugins Author(s): John Hsu autogenerated on Tue Apr 6 2021 02:19:40 .32 * \brief A skid steering drive plugin. Inspired by gazebo_ros_diff_drive and SkidSteerDrivePlugin
I'm trying to work with new skid steering drive plugin and URDF model of Pioneer 3AT. I included plugin to my URDF file, but still getting:I'm fairly new to gazebo, robot modelling and plugins, and I'm now trying to make a small 4wd rover, but I have some problems with the plugins. I'm not able to make the libgazebo_ros_skid_steer_drive plugin work in my urdf file in ROS2, and I .Skid Steer plugin for a 4 wheel skid steer drive robot. #This plugin has been modified from the Diff-drive-plugin. #make sure to edit and add this in the bashscript for ease
skid steer mulcher for rent corpus christi tx

gazebo wheel drive plug in
Xinyuan XYB65ECO 6 Ton China Wheel Excavator Machine China Excavators Factory, Find Details and Price about Mini Excavator Excavator from Xinyuan XYB65ECO 6 Ton China Wheel Excavator Machine China Excavators Factory - Fujian Xinyuan Heavy Industries Co., Ltd.
gazebo skid steer plugin|gazebo wheel joint drive plugin